
摆线针轮行星减速器输出机构的柱销受力分析
摘 要: 在深入研究摆线针轮行星传动理论的基础上,分析了输出机构的柱销( 柱销套) 作用于摆线轮上的力,运用UG建模功能及机械系统动力学仿真分析(ADAMS) 虚拟样机技术,对摆线针轮行星减速器样机进行动力学仿真&得到了柱销( 柱销套) 作用于摆线轮上力的曲线,分析了柱销( 柱销套) 对摆线轮的最大作用力及减小作用力的方法,为后续的摆线针轮行星减速器的设计研究奠定基础.
关键词: 摆线轮 柱销 动力学仿真 ADAMS
摆线传动由于结构紧凑,体积小,重量轻。传动比范围大,传动效率高,传动平稳可靠,使用寿命长等特点,在冶金,矿山,石油,化工,船舶,轻工,食品,纺织,印染,制药,橡胶,塑料,起重运输以及军工等部门得到广泛的应用.
摆线轮主要承受+种载荷: "针齿作用在摆线轮上的力,#柱销D柱销套F作用在摆线轮上的力,$转臂轴承作用在摆线轮上的合力&柱销式输出机构是摆线针轮行星减速器常用的输出机构,柱销直接影响着摆线针轮行星减速器的传动平稳性&在以往的研究中主要着眼于针齿作用在摆线轮上的力,而本文以一个小功率的摆线针轮行星减速器虚拟样机为基础,利用 UG进行摆线轮参数化建模,利用 XIX:" 进行摆线轮的动力学分析,得到柱销( 柱销套) 质心位移曲线以及柱销作用在摆线轮上力的曲线.
1 输出机构柱销作用于摆线轮上力的计算
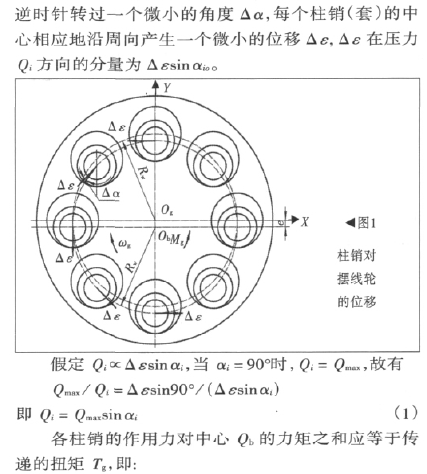
摆线针轮行星减速器柱销式输出机构是利用柱销和柱销套将摆线轮与输出轴连接起来的输出机构,简称 7 机构&如图$所示,当摆线轮顺时针方向转动时,即 7 机构逆时针方向作用于摆线轮上一个阻力矩 I;&此时,! 轴右边的柱销孔与柱销套有离开的趋势; 而在! 轴左边的柱销孔与柱销套接触而受力&各柱销套对摆线轮的作用力为 5$%5T# 5&&其方向为接触点的公法线方向,即平行于偏心距 N;NM的方向&在力 5&的作用力下接触变形,而使 4 机构的圆盘相对于摆线轮

2 摆线针轮行星减速器的建模及动力学仿真
2.1 基于UG的摆线传动参数化建模
本文主要对在运动过程中的柱销( 柱销套) 对摆线轮作用力进行分析,故将双偏心对称布置的摆线传动结构简化为一片摆线轮传动的模型,并进行结构简化&去掉箱体%间隔套等部件,仅保留含有偏心套,轴承,摆线轮,针齿销,针齿套,柱销套的摆线轮机构.
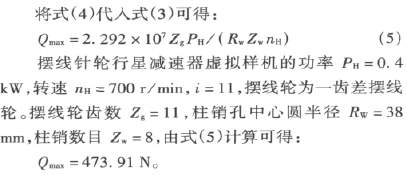
对于摆线针轮行星减速器的建模,其难点在于摆线轮齿廓曲线的建立,笔者利用 UG的"expression"(来 创 建摆线修形齿廓的曲线 方 程 ,利 用"lawcure"(来实现摆线轮齿廓曲线的建立&装配完成后进行干涉检查,以确认结构设计的可行性&最后的模型如图2所示。
2.2 摆线针轮行星减速器的动力学仿真
将用 UG 装配好的摆线针轮行星减速器样机模型以 E5C5N6?1H 格式导出,再导入 XIX:" 进行动力学分析&由于在格式转换过程中,装配图的零件的名称信息会丢失,XIX:" 软件会按照已有的命名规则将零件统一重新命名&为了运动分析的方便,在将模型导入到XIX:" 后,就要对所有的零件进行重新命名,并设置材料属性%颜色等信息,将单位设置为 ::q"&为进一步简化模型,忽略偏心套与轴承间的相对运动,将轴承与偏心套进行合并,作为一个部件&添加运动副如下.
(1)对所有的针齿销添加固定副&T
(2) 在针齿销与针齿套之间添加旋转副&+) 在摆线轮与针齿套之间添加摆线轮相对于针齿
套的体对体实体接触&
(3) 在摆线轮与针齿套之间添加摆线轮相对于针齿套的体对体实体接触
2.3 结果与分析
对摆线针轮行星减速器模型进行仿真,通过仿真得到所有零部件的运动曲线&柱销( 柱销套)质心在 - 和 ! 方向的位移曲线分别如图’和图Q所示D 任选一柱销套为例 F &图U为柱销( 柱销套) 质心位移曲线&
以柱销孔所在圆的圆心为原点,由图’和图Q可知,柱销( 柱销套) 的质心均在-%! 方向上作最大值为’Q和最小值为 & ’Q的往复位移运动&柱销( 柱销套) 在%P ’N 内往复运动约’P TQ次,这与摆线轮转’P T’转(%P ’ r’T %%% - +U% - $$) 一致&由图U可知柱销( 柱销套) 的质心
作最大值为UQ和最小值为Q,的往复位移运动&所以图’%图Q%图U可知柱销( 柱销套) 的位移与实际情况符合。 柱销( 柱销套) 分别作用于摆线轮上在-%! 方 向 上 力 的 曲线,如图,和图)所示&柱销( 柱销套) 作用于摆线轮上力的曲线如图所示 由图,和图)可知柱销( 柱销套) 作用于摆线轮上在 -%! 方向上 的 力 呈 周 期 性 变化&图$%中实线是柱销( 柱销套) 作用于摆线轮上力的曲线( 图() 的局部放大图,虚线是柱销套质心位移曲线( 图U) 的局部放大图&由图$%可知柱销( 柱销套) 作用于摆线轮上的力呈周期性变化&由图(可知柱销作用于摆线轮上的力在启动瞬间较大,之后迅速进入稳定状态,且启动瞬间的啮合作用力约为正常运动过程的两倍&稳定后柱销( 柱销套) 作用于摆线轮上的力最大为QQUP U, #,而通过式(Q) 计算得到的最大作用力为’,+P ($ #&由于零件制造和装配误差的影响,柱销套与柱销孔不一定都同时接触,而式(Q) 对这些因素考虑不足,所以通过仿真求得的最大作用力大于式(Q) 所求&这说明零件制造误差和装配误差对柱销( 柱销套) 作用于摆线轮的力影响比较大,为了减小柱销( 柱销套) 对摆线轮的作用力,提高摆线轮的性能,要减小零件制造误差和避免装配误差.
3 结论
笔者在深入研究摆线针轮行星传动理论的基础上,分析了输出机构的柱销( 柱销套) 作用于摆线轮上的力&以一个小功率的摆线针轮行星减速器虚拟样机为 基础 ,利 用 c< 进 行 摆线 轮 参 数 化建 模 ,利 用XIX:" 进行摆线轮的动力学仿真分析,得到柱销( 柱销套) 作用在摆线轮上力的曲线&分析了试验结果,提出减小柱销( 柱销套) 对摆线轮作用力的方法,为摆线针轮行星减速器性能的进一步改善提供了理论依据.








